我在尝试运行一个有关GGUI使用的例子时出现了以下错误:
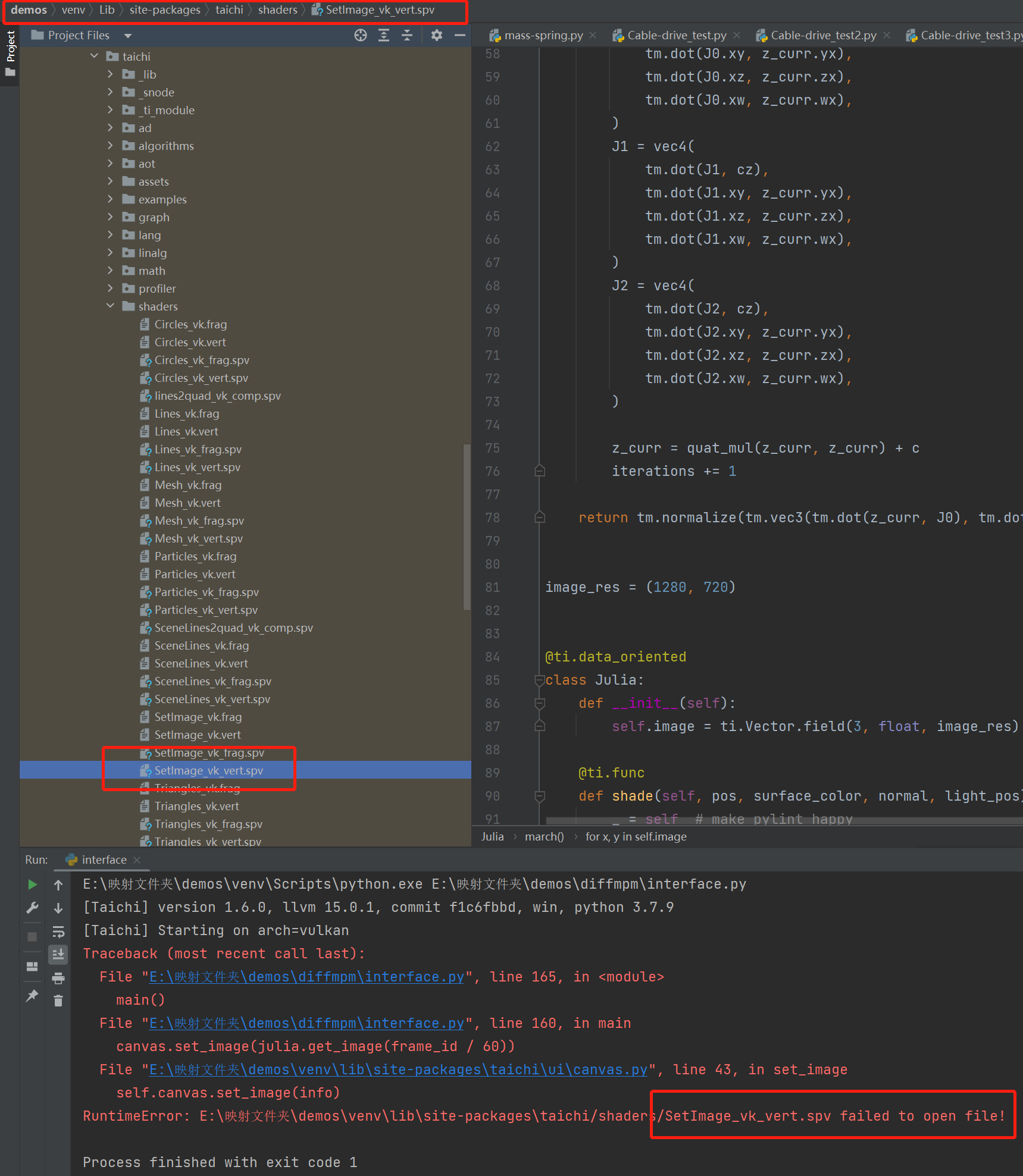
这个spv文件是在指定目录中的,但出现报错问题,请问该如何解决这种情况?
以下是我运行时的代码:
import taichi as ti
import taichi.math as tm
arch = ti.vulkan if ti._lib.core.with_vulkan() else ti.cuda
ti.init(arch=arch)
vec3 = tm.vec3
vec4 = tm.vec4
@ti.func
def quat_mul(v1, v2):
return vec4(
v1.x * v2.x - tm.dot(v1.yzw, v2.yzw),
v1.x * v2.yzw + v2.x * v1.yzw + tm.cross(v1.yzw, v2.yzw),
)
@ti.func
def quat_conj(q):
return vec4(q.x, -q.yzw)
iters = 10
max_norm = 4
@ti.func
def compute_sdf(z, c):
md2 = 1.0
mz2 = tm.dot(z, z)
for _ in range(iters):
md2 *= max_norm * mz2
z = quat_mul(z, z) + c
mz2 = z.dot(z)
if mz2 > max_norm:
break
return 0.25 * ti.sqrt(mz2 / md2) * ti.log(mz2)
@ti.func
def compute_normal(z, c):
J0 = vec4(1, 0, 0, 0)
J1 = vec4(0, 1, 0, 0)
J2 = vec4(0, 0, 1, 0)
z_curr = z
iterations = 0
while z_curr.norm() < max_norm and iterations < iters:
cz = quat_conj(z_curr)
J0 = vec4(
tm.dot(J0, cz),
tm.dot(J0.xy, z_curr.yx),
tm.dot(J0.xz, z_curr.zx),
tm.dot(J0.xw, z_curr.wx),
)
J1 = vec4(
tm.dot(J1, cz),
tm.dot(J1.xy, z_curr.yx),
tm.dot(J1.xz, z_curr.zx),
tm.dot(J1.xw, z_curr.wx),
)
J2 = vec4(
tm.dot(J2, cz),
tm.dot(J2.xy, z_curr.yx),
tm.dot(J2.xz, z_curr.zx),
tm.dot(J2.xw, z_curr.wx),
)
z_curr = quat_mul(z_curr, z_curr) + c
iterations += 1
return tm.normalize(tm.vec3(tm.dot(z_curr, J0), tm.dot(z_curr, J1), tm.dot(z_curr, J2)))
image_res = (1280, 720)
@ti.data_oriented
class Julia:
def __init__(self):
self.image = ti.Vector.field(3, float, image_res)
@ti.func
def shade(self, pos, surface_color, normal, light_pos):
_ = self # make pylint happy
light_color = vec3(1)
light_dir = tm.normalize(light_pos - pos)
return light_color * surface_color * ti.max(0, tm.dot(light_dir, normal))
@ti.kernel
def march(self, time_arg: float):
time = time_arg * 0.15
c = 0.45 * ti.cos(vec4(0.5, 3.9, 1.4, 1.1) + time * vec4(1.2, 1.7, 1.3, 2.5)) - vec4(0.3, 0, 0, 0)
r = 1.8
o3 = (
tm.normalize(
vec3(
r * ti.cos(0.3 + 0.37 * time),
0.3 + 0.8 * r * ti.cos(1.0 + 0.33 * time),
r * ti.cos(2.2 + 0.31 * time),
)
)
* r
)
ta = vec3(0)
cr = 0.1 * ti.cos(0.1 * time)
for x, y in self.image:
p = (-tm.vec2(image_res) + 2.0 * tm.vec2(x, y)) / (image_res[1] * 0.75)
cw = tm.normalize(ta - o3)
cp = vec3(ti.sin(cr), ti.cos(cr), 0)
cu = tm.normalize(cw.cross(cp))
cv = tm.normalize(cu.cross(cw))
d3 = tm.normalize(p.x * cu + p.y * cv + 2.0 * cw)
o = vec4(o3, 0)
d = vec4(d3, 0)
max_t = 10
t = 0.0
for step in range(300):
h = compute_sdf(o + t * d, c)
t += h
if h < 0.0001 or t >= max_t:
break
if t < max_t:
normal = compute_normal(o + t * d, c)
color = abs((o + t * d).xyz) / 1.3
pos = (o + t * d).xyz
self.image[x, y] = self.shade(pos, color, normal, o3)
else:
self.image[x, y] = (0, 0, 0)
def get_image(self, time):
self.march(time)
return self.image
def main():
julia = Julia()
window = ti.ui.Window("Fractal 3D", image_res, vsync=True)
canvas = window.get_canvas()
frame_id = 0
while window.running:
frame_id += 1
canvas.set_image(julia.get_image(frame_id / 60))
window.show()
if __name__ == "__main__":
main()

