一月高光时刻:
![]() Taichi v1.4 发布,Taichi AOT 正式发布 Vulkan 后端的运行时库 TiRT 及其 C API
Taichi v1.4 发布,Taichi AOT 正式发布 Vulkan 后端的运行时库 TiRT 及其 C API
![]() Taichi Slack 将逐步迁移至 Discord,欢迎来 讨论!
Taichi Slack 将逐步迁移至 Discord,欢迎来 讨论!
![]() RAL 论文:基于弹性体形变仿真的视触觉传感器仿真器 Tacchi
RAL 论文:基于弹性体形变仿真的视触觉传感器仿真器 Tacchi
技术动态
Taichi v1.4 发布
重要更新包括:
- Taichi AOT 已正式启用,并提供了基于 C API 的 Taichi 原生运行时库(TiRT)。现在不需要 Python 解释器也可运行编译好的 Taichi kernel。
- Taichi kernel 编译速度显著提升,在一些大量使用 ti.Matrix 的场景中提升可达 2 倍。
- Taichi ndarray 现已正式发布。这是一种保存连续多维数据的数组对象,可以方便地与外部库进行数据交换。
- 支持所有后端的动态索引。不再需要 dynamic_index=True 来访问具有运行时变量的向量/矩阵。
- 移除了 Metal 后端对 sparse SNode 的支持。
有关此版本的更多信息,请参阅完整的 变更日志。
赶快升级体验最新功能吧![]()
pip install -U taichi==1.4.1
![]() 本月合并 231 个 PR,解决 39 个 issue。
本月合并 231 个 PR,解决 39 个 issue。
社区精选作品
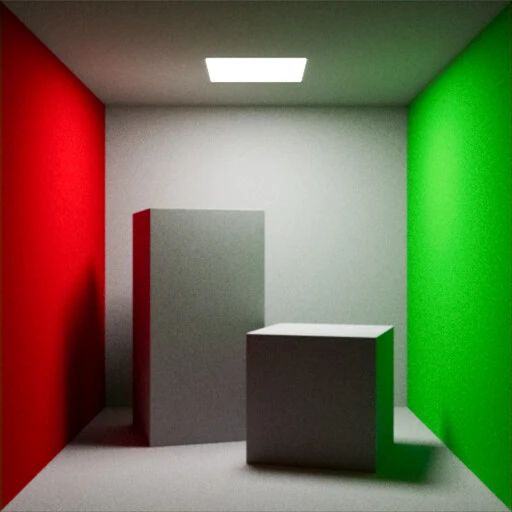
Ti example 投稿:Cornell box
Cornell box(康奈尔盒子)是图形学中常用来观察和测试全局光照的场景,社区的烧风同学使用蒙特卡洛路径追踪采样简化程序后,只用 139 行代码就完成了这个作品。
烧风同学持续高产~这次的作品是一只水晶兔子,祝社区的小伙伴们兔年吉祥,健康平安!

社区活动
编译器优化技术 Equality Saturation,是如何提升运算性能的?
主讲人何德源是普林斯顿大学一年级博士生,刚刚结束了在太极图形的远程实习。他的主要研究方向是编程语言、形式化方法和深度学习编译器。本次分享讲解了编译优化中的 Equality Saturation 技术以及他在 Taichi 中对其应用的探索。
精选论文
Tacchi: A Pluggable and Low Computational Cost Elastomer Deformation Simulator for Optical Tactile Sensors
本文利用 Taichi 和 MLS-MPM 方法仿真了真实世界中的机器人光学触觉传感器,利用粒子表示弹性体与刚体,实现了基于物理形变规则的高效仿真。
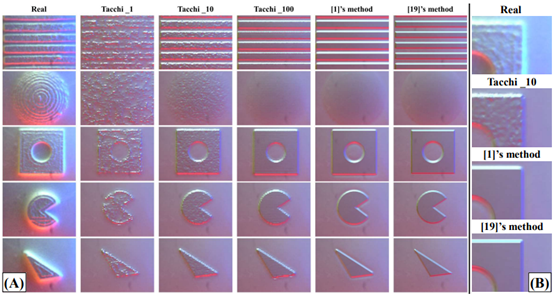
实际触觉图片、Tacchi 方法和其它方法的仿真图片
论文一作陈子熙同学也将录制 Paper Reading 视频详细解读,敬请关注!
成为 Taichi 贡献者
欢迎大家参与 Taichi 开发,这里有一些 issue 可以尝试解决:
更多 good first issue(非常容易上手)和 welcome contribution(稍微带有挑战性)的 issue 请查阅页面。Contribute to taichi-dev/taichi · GitHub
期待更多同学加入贡献者的队伍之中,特别送上几则小贴士:
![]() Taichi 贡献者指南
Taichi 贡献者指南
一文带大家读懂如何成为 Taichi 贡献者,解释了具体的代码规范,也包含了实用小技巧,便于大家快速上手。
![]() Taichi 编程语言的开发进度面板
Taichi 编程语言的开发进度面板
便于大家快速了解 Taichi 未处理/进展中/已处理/已完成开发的 issues。
![]() 加入 GitHub discussion
加入 GitHub discussion
在这里你可以与海内外开发者一起讨论功能开发、Taichi roadmap 等话题,也欢迎提出你对 Taichi 的建议。
![]() Awesome Taichi
Awesome Taichi
精选社区同学用 Taichi 做出的优质项目,可以从中找到感兴趣的例子尝试运行。