kernel里面应该是不能用python的list的吧,尝试使用ti.Vector代替list看看?
1 个赞
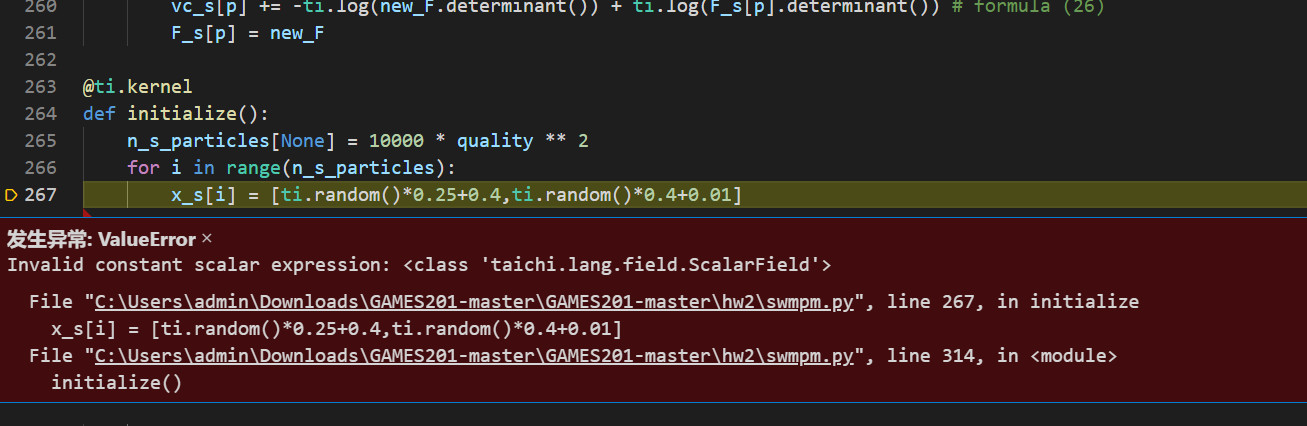
好像并不是这个原因,这个代码是GAMES201的优秀作业,代码应该没有什么大问题吧,我改了之后还是这么报错
这个应该是taichi-scope中range()里用了taichi field造成的(应该用int类型的常数,或者用[None]取出field里的值,也可以直接用struct for),在早期taichi版本没有强制要求(编译时会被替换),现在是会报错的
我修改了一下,可能出错的都改成struct for了,在我的电脑上是可以运行的:
import taichi as ti
import numpy as np
import time
ti.init(arch=ti.gpu)
quality = 1
n_particles = 20000 * quality ** 2
n_s_particles = ti.field(dtype = int, shape = ())
n_w_particles = ti.field(dtype = int, shape = ())
n_grid = 128 * quality
dx, inv_dx = 1 / n_grid, float(n_grid)
dt = 2e-4 / quality
gravity = ti.Vector([0, -9.8])
d = 2
# sand particle properties
x_s = ti.Vector.field(2, dtype = float, shape = n_particles) # position
v_s = ti.Vector.field(2, dtype = float, shape = n_particles) # velocity
C_s = ti.Matrix.field(2, 2, dtype = float, shape = n_particles) # affine velocity matrix
F_s = ti.Matrix.field(2, 2, dtype = float, shape = n_particles) # deformation gradient
phi_s = ti.field(dtype = float, shape = n_particles) # cohesion and saturation
c_C0 = ti.field(dtype = float, shape = n_particles) # initial cohesion (as maximum)
vc_s = ti.field(dtype = float, shape = n_particles) # tracks changes in the log of the volume gained during extension
alpha_s = ti.field(dtype = float, shape = n_particles) # yield surface size
q_s = ti.field(dtype = float, shape = n_particles) # harding state
# sand grid properties
grid_sv = ti.Vector.field(2, dtype = float, shape = (n_grid, n_grid)) # grid node momentum/velocity
grid_sm = ti.field(dtype = float, shape = (n_grid, n_grid)) # grid node mass
grid_sf = ti.Vector.field(2, dtype = float, shape = (n_grid, n_grid)) # forces in the sand
# water particle properties
x_w = ti.Vector.field(2, dtype = float, shape = n_particles) # position
v_w = ti.Vector.field(2, dtype = float, shape = n_particles) # velocity
C_w = ti.Matrix.field(2, 2, dtype = float, shape = n_particles) # affine velocity matrix
J_w = ti.field(dtype = float, shape = n_particles) # ratio of volume increase
# water grid properties
grid_wv = ti.Vector.field(2, dtype = float, shape = (n_grid, n_grid)) # grid node momentum/velocity
grid_wm = ti.field(dtype = float, shape = (n_grid, n_grid)) # grid node mass
grid_wf = ti.Vector.field(2, dtype = float, shape = (n_grid, n_grid)) # forces in the water
# constant values
p_vol, s_rho, w_rho = (dx * 0.5) ** 2, 400, 400
s_mass, w_mass = p_vol * s_rho, p_vol * w_rho
w_k, w_gamma = 50, 3 # bulk modulus of water and gamma is a term that more stiffy penalizes large deviations from incompressibility
n, k_hat = 0.4, 0.2 # sand porosity and permeability
E_s, nu_s = 3.537e5, 0.3 # sand's Young's modulus and Poisson's ratio
mu_s, lambda_s = E_s / (2 * (1 + nu_s)), E_s * nu_s / ((1 + nu_s) * (1 - 2 * nu_s)) # sand's Lame parameters
mu_b = 0.75 # coefficient of friction
a, b, c0, sC = -3.0, 0, 1e-2, 0.15
# The scalar function h_s is chosen so that the multiplier function is twice continuously differentiable
@ti.func
def h_s(z):
ret = 0.0
if z < 0: ret = 1
if z > 1: ret = 0
ret = 1 - 10 * (z ** 3) + 15 * (z ** 4) - 6 * (z ** 5)
return ret
# multiplier
sqrt2 = ti.sqrt(2)
@ti.func
def h(e):
u = e.trace() / sqrt2
v = ti.abs(ti.Vector([e[0, 0] - u / sqrt2, e[1, 1] - u / sqrt2]).norm())
fe = c0 * (v ** 4) / (1 + v ** 3)
ret = 0.0
if u + fe < a + sC: ret = 1
if u + fe > b + sC: ret = 0
ret = h_s((u + fe - a - sC) / (b - a))
return ret
state = ti.field(dtype = int, shape = n_particles)
pi = 3.14159265358979
@ti.func
def project(e0, p):
e = e0 + vc_s[p] / d * ti.Matrix.identity(float, 2) # volume correction treatment
e += (c_C0[p] * (1.0 - phi_s[p])) / (d * alpha_s[p]) * ti.Matrix.identity(float, 2) # effects of cohesion
ehat = e - e.trace() / d * ti.Matrix.identity(float, 2)
Fnorm = ti.sqrt(ehat[0, 0] ** 2 + ehat[1, 1] ** 2) # Frobenius norm
yp = Fnorm + (d * lambda_s + 2 * mu_s) / (2 * mu_s) * e.trace() * alpha_s[p] # delta gamma
new_e = ti.Matrix.zero(float, 2, 2)
delta_q = 0.0
if Fnorm <= 0 or e.trace() > 0: # Case II:
new_e = ti.Matrix.zero(float, 2, 2)
delta_q = ti.sqrt(e[0, 0] ** 2 + e[1, 1] ** 2)
state[p] = 0
elif yp <= 0: # Case I:
new_e = e0 # return initial matrix without volume correction and cohesive effect
delta_q = 0
state[p] = 1
else: # Case III:
new_e = e - yp / Fnorm * ehat
delta_q = yp
state[p] = 2
return new_e, delta_q
h0, h1, h2, h3 = 35, 9, 0.2, 10
@ti.func
def hardening(dq, p): # The amount of hardening depends on the amount of correction that occurred due to plasticity
q_s[p] += dq
phi = h0 + (h1 * q_s[p] - h3) * ti.exp(-h2 * q_s[p])
phi = phi / 180 * pi # details in Table. 3: Friction angle phi_F and hardening parameters h0, h1, and h3 are listed in degrees for convenience
sin_phi = ti.sin(phi)
alpha_s[p] = ti.sqrt(2 / 3) * (2 * sin_phi) / (3 - sin_phi)
@ti.kernel
def substep():
# set zero initial state for both water/sand grid
for i, j in grid_sm:
grid_sv[i, j], grid_wv[i, j] = [0, 0], [0, 0]
grid_sm[i, j], grid_wm[i, j] = 0, 0
grid_sf[i, j], grid_wf[i, j] = [0, 0], [0, 0]
# P2G (sand's part)
# for p in range(n_s_particles):
for p in x_s:
base = (x_s[p] * inv_dx - 0.5).cast(int)
if base[0] < 0 or base[1] < 0 or base[0] >= n_grid - 2 or base[1] >= n_grid - 2:
continue
fx = x_s[p] * inv_dx - base.cast(float)
# Quadratic kernels [http://mpm.graphics Eqn. 123, with x=fx, fx-1,fx-2]
w = [0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1) ** 2, 0.5 * (fx - 0.5) ** 2]
U, sig, V = ti.svd(F_s[p])
inv_sig = sig.inverse()
e = ti.Matrix([[ti.log(sig[0, 0]), 0], [0, ti.log(sig[1, 1])]])
stress = U @ (2 * mu_s * inv_sig @ e + lambda_s * e.trace() * inv_sig) @ V.transpose() # formula (25)
stress = (-p_vol * 4 * inv_dx * inv_dx) * stress @ F_s[p].transpose()
# stress *= h(e)
# print(h(e))
affine = s_mass * C_s[p]
for i, j in ti.static(ti.ndrange(3, 3)):
offset = ti.Vector([i, j])
dpos = (offset.cast(float) - fx) * dx
weight = w[i][0] * w[j][1]
grid_sv[base + offset] += weight * (s_mass * v_s[p] + affine @ dpos)
grid_sm[base + offset] += weight * s_mass
grid_sf[base + offset] += weight * stress @ dpos
# P2G (water's part):
# for p in range(n_w_particles):
for p in x_w:
base = (x_w[p] * inv_dx - 0.5).cast(int)
fx = x_w[p] * inv_dx - base.cast(float)
# Quadratic kernels [http://mpm.graphics Eqn. 123, with x=fx, fx-1,fx-2]
w = [0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1) ** 2, 0.5 * (fx - 0.5) ** 2]
stress = w_k * (1 - 1 / (J_w[p] ** w_gamma))
stress = (-p_vol * 4 * inv_dx * inv_dx) * stress * J_w[p]
# stress = -4 * 400 * p_vol * (J_w[p] - 1) / dx ** 2 (special case when gamma equals to 1)
affine = w_mass * C_w[p]
# affine = ti.Matrix([[stress, 0], [0, stress]]) + w_mass * C_w[p]
for i, j in ti.static(ti.ndrange(3, 3)):
offset = ti.Vector([i, j])
dpos = (offset.cast(float) - fx) * dx
weight = w[i][0] * w[j][1]
grid_wv[base + offset] += weight * (w_mass * v_w[p] + affine @ dpos)
grid_wm[base + offset] += weight * w_mass
grid_wf[base + offset] += weight * stress * dpos
# Update Grids Momentum
for i, j in grid_sm:
if grid_sm[i, j] > 0:
grid_sv[i, j] = (1 / grid_sm[i, j]) * grid_sv[i, j] # Momentum to velocity
if grid_wm[i, j] > 0:
grid_wv[i, j] = (1 / grid_wm[i, j]) * grid_wv[i, j]
# Momentum exchange
cE = (n * n * w_rho * gravity[1]) / k_hat # drag coefficient
if grid_sm[i, j] > 0 and grid_wm[i, j] > 0:
sm, wm = grid_sm[i, j], grid_wm[i, j]
sv, wv = grid_sv[i, j], grid_wv[i, j]
d = cE * sm * wm
M = ti.Matrix([[sm, 0], [0, wm]])
D = ti.Matrix([[-d, d], [d, -d]])
V = ti.Matrix.rows([grid_sv[i, j], grid_wv[i, j]])
G = ti.Matrix.rows([gravity, gravity])
F = ti.Matrix.rows([grid_sf[i, j], grid_wf[i, j]])
A = M + dt * D
B = M @ V + dt * (M @ G + F)
X = A.inverse() @ B
grid_sv[i, j], grid_wv[i, j] = ti.Vector([X[0, 0], X[0, 1]]), ti.Vector([X[1, 0], X[1, 1]])
elif grid_sm[i, j] > 0:
grid_sv[i, j] += dt * (gravity + grid_sf[i, j] / grid_sm[i, j]) # Update explicit force
elif grid_wm[i, j] > 0:
grid_wv[i, j] += dt * (gravity + grid_wf[i, j] / grid_wm[i, j])
normal = ti.Vector.zero(float, 2)
if grid_sm[i, j] > 0:
if i < 3 and grid_sv[i, j][0] < 0: normal = ti.Vector([1, 0])
if i > n_grid - 3 and grid_sv[i, j][0] > 0: normal = ti.Vector([-1, 0])
if j < 3 and grid_sv[i, j][1] < 0: normal = ti.Vector([0, 1])
if j > n_grid - 3 and grid_sv[i, j][1] > 0: normal = ti.Vector([0, -1])
if not (normal[0] == 0 and normal[1] == 0): # Apply friction
s = grid_sv[i, j].dot(normal)
if s <= 0:
v_normal = s * normal
v_tangent = grid_sv[i, j] - v_normal # divide velocity into normal and tangential parts
vt = v_tangent.norm()
if vt > 1e-12: grid_sv[i, j] = v_tangent - (vt if vt < -mu_b * s else -mu_b * s) * (v_tangent / vt) # The Coulomb friction law
if grid_wm[i, j] > 0:
if i < 3 and grid_wv[i, j][0] < 0: grid_wv[i, j][0] = 0 # Boundary conditions
if i > n_grid - 3 and grid_wv[i, j][0] > 0: grid_wv[i, j][0] = 0
if j < 3 and grid_wv[i, j][1] < 0: grid_wv[i, j][1] = 0
if j > n_grid - 3 and grid_wv[i, j][1] > 0: grid_wv[i, j][1] = 0
# G2P (water's part)
# for p in range(n_w_particles):
for p in x_w:
base = (x_w[p] * inv_dx - 0.5).cast(int)
fx = x_w[p] * inv_dx - base.cast(float)
w = [0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1.0) ** 2, 0.5 * (fx - 0.5) ** 2]
new_v = ti.Vector.zero(float, 2)
new_C = ti.Matrix.zero(float, 2, 2)
for i, j in ti.static(ti.ndrange(3, 3)):
dpos = ti.Vector([i, j]).cast(float) - fx
g_v = grid_wv[base + ti.Vector([i, j])]
weight = w[i][0] * w[j][1]
new_v += weight * g_v
new_C += 4 * inv_dx * weight * g_v.outer_product(dpos)
J_w[p] = (1 + dt * new_C.trace()) * J_w[p]
v_w[p], C_w[p] = new_v, new_C
x_w[p] += dt * v_w[p]
# G2P (sand's part)
# for p in range(n_s_particles):
for p in x_s:
base = (x_s[p] * inv_dx - 0.5).cast(int)
if base[0] < 0 or base[1] < 0 or base[0] >= n_grid - 2 or base[1] >= n_grid - 2:
continue
fx = x_s[p] * inv_dx - base.cast(float)
w = [0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1.0) ** 2, 0.5 * (fx - 0.5) ** 2]
new_v = ti.Vector.zero(float, 2)
new_C = ti.Matrix.zero(float, 2, 2)
phi_s[p] = 0.0 # Saturation
for i, j in ti.static(ti.ndrange(3, 3)): # loop over 3x3 grid node neighborhood
dpos = ti.Vector([i, j]).cast(float) - fx
g_v = grid_sv[base + ti.Vector([i, j])]
weight = w[i][0] * w[j][1]
new_v += weight * g_v
new_C += 4 * inv_dx * weight * g_v.outer_product(dpos)
if grid_sm[base + ti.Vector([i, j])] > 0 and grid_wm[base + ti.Vector([i, j])] > 0:
phi_s[p] += weight # formula (24)
F_s[p] = (ti.Matrix.identity(float, 2) + dt * new_C) @ F_s[p]
v_s[p], C_s[p] = new_v, new_C
x_s[p] += dt * v_s[p]
U, sig, V = ti.svd(F_s[p])
e = ti.Matrix([[ti.log(sig[0, 0]), 0], [0, ti.log(sig[1, 1])]])
new_e, dq = project(e, p)
hardening(dq, p)
new_F = U @ ti.Matrix([[ti.exp(new_e[0, 0]), 0], [0, ti.exp(new_e[1, 1])]]) @ V.transpose()
vc_s[p] += -ti.log(new_F.determinant()) + ti.log(F_s[p].determinant()) # formula (26)
F_s[p] = new_F
@ti.kernel
def initialize():
n_s_particles[None] = 10000 * quality ** 2
for i in x_s:
x_s[i] = [ti.random() * 0.25 + 0.4, ti.random() * 0.4 + 0.01]
v_s[i] = ti.Matrix([0, 0])
F_s[i] = ti.Matrix([[1, 0], [0, 1]])
c_C0[i] = -0.01
alpha_s[i] = 0.267765
pos_y[None] = 0.5
n_w_particles[None] = 0
pos_y = ti.field(dtype = float, shape = ())
@ti.kernel
def update_jet():
if n_w_particles[None] < 20000 - 50:
for i in range(n_w_particles[None], n_w_particles[None] + 50):
x_w[i] = [ti.random() * 0.03 + 0.92, ti.random() * 0.03 + pos_y[None]]
v_w[i] = ti.Matrix([-1.5, 0])
J_w[i] = 1
n_w_particles[None] += 50
# add a new sand block with mouse position
@ti.kernel
def add_block(x : ti.f32):
if n_s_particles[None] < 40000 - 1000:
for i in range(n_s_particles[None], n_s_particles[None] + 1000):
x_s[i] = [ti.min(0.87, x) + ti.random() * 0.1, ti.random() * 0.1 + 0.87]
v_s[i] = ti.Matrix([0, -0.25])
F_s[i] = ti.Matrix([[1, 0], [0, 1]])
c_C0[i] = -0.01
alpha_s[i] = 0.267765
n_s_particles[None] += 1000
@ti.func
def color_lerp(r1, g1, b1, r2, g2, b2, t):
return int((r1 * (1 - t) + r2 * t) * 0x100) * 0x10000 + int((g1 * (1 - t) + g2 * t) * 0x100) * 0x100 + int((b1 * (1 - t) + b2 * t) * 0x100)
# show different color for different cohesion of sand and different velocity of water
color_s = ti.field(dtype = int, shape = n_particles)
color_w = ti.field(dtype = int, shape = n_particles)
@ti.kernel
def update_color():
# for i in range(n_s_particles):
for i in color_s:
color_s[i] = color_lerp(0.521, 0.368, 0.259, 0.318, 0.223, 0.157, phi_s[i])
# for i in range(n_w_particles):
for i in color_w:
color_w[i] = color_lerp(0.2, 0.231, 0.792, 0.867, 0.886, 0.886, v_w[i].norm() / 7.0)
initialize()
project_view = False
frame = 0
gui = ti.GUI("2D Dam", res = 512, background_color = 0xFFFFFF)
while True:
# show hints
gui.text(content = f'w/s to move jet upward and downward', pos = (0, 0.99), color = 0x111111)
gui.text(content = f'left mouse click to add new porous sand block', pos = (0, 0.96), color = 0x111111)
gui.text(content = f'space to switch normal/project-operation-state view', pos = (0, 0.93), color = 0x111111)
# process input
for e in gui.get_events(ti.GUI.PRESS):
if e.key == gui.SPACE: project_view = not project_view
elif e.key == 'w': pos_y[None] += 0.01 # move jet upward
elif e.key == 's': pos_y[None] -= 0.01 # move jet downward
elif e.key == ti.GUI.LMB: add_block(e.pos[0])
elif e.key in [ti.GUI.ESCAPE, ti.GUI.EXIT]:
exit()
update_jet()
for s in range(50):
substep()
# project-operation-state view
if project_view:
gui.circles(x_w.to_numpy(), radius = 1.5, color = 0x068587)
colors = np.array([0xFF0000, 0x00FF00, 0x0000FF], dtype = np.uint32)
gui.circles(x_s.to_numpy(), radius = 1.5, color = colors[state.to_numpy()])
else:
update_color()
gui.circles(x_w.to_numpy(), radius = 1.5, color = color_w.to_numpy())
gui.circles(x_s.to_numpy(), radius = 1.5, color = color_s.to_numpy())
# gui.show(f'{frame:06d}.png')
gui.show()
frame += 1
3 个赞
这个应该是taichi-scope中range()里用了taichi field造成的(应该用float, int这类常数,或者直接用struct for),在早期taichi版本可能没有强制要求,现在是会报错的
我修改了一下,可能出错的都改成struct for了,在我的电脑上是可以运行的:
谢谢铭睿~ The solution works for me!
1 个赞
这个sand-water coupling效果太棒了!可以玩一整天hhhh 
1 个赞