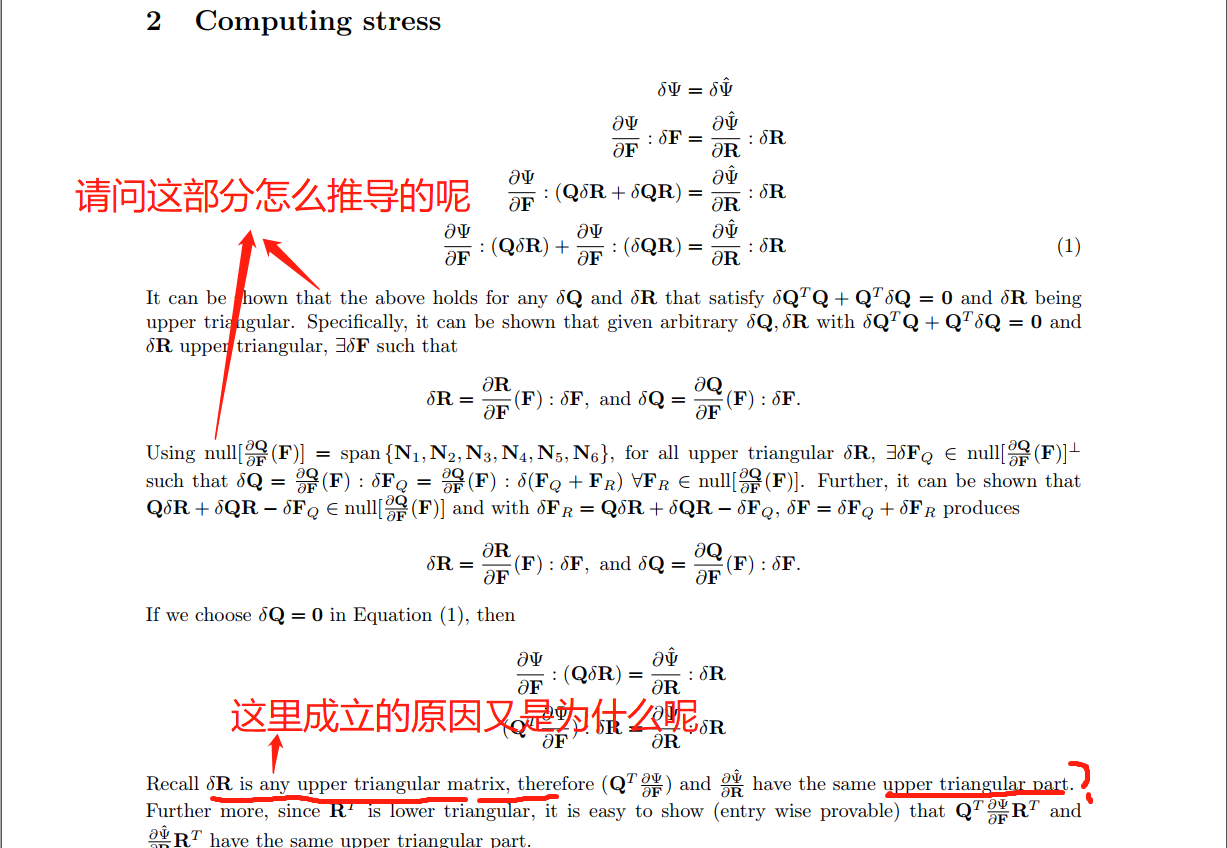
看了蒋老师布料仿真的文章,自己尝试实现了一下二维情况。
然后实现有以下一些问题还没有解决:
1)很可能是sympletic Euler, 实现的结果容易炸掉,需要把dt调的很小,或者grid分辨率调低。
2)文章中的type(i)点很容易在碰撞中被甩下来(图中的粉色点),甩下来那个积分点就没用了吧。
3)不知道啥原因,纤维之间的摩擦力(return mapping中的cf系数)不管怎么调,就是调不到丝滑的效果,不过加塑性和不加塑性还是有区别的
4)还有一些奇妙的抽抽效果…
5) 对于文章里APIC中C的damping稍微加一点就有问题
哎~~~脑壳疼
不知有木有小伙伴也跑了这篇,求交流。
Reference:
Jiang et al. Anisotropic Elastoplasticity for Cloth, Knit and Hair Frictional Contact (2017)
Jiang et al. Anisotropic elastoplasticity for cloth, knit and hair frictional contact supplementary technical document
import taichi as ti
import numpy as np
import random
ti.init(arch = ti.cuda)
ti.reset()
res = 512
E = 4000 #拉伸部分惩罚
gamma = 500 # shear部分惩罚
k = 6000 # 法向挤压惩罚
damping_C = 0
dim = 2
n_grid = 128
dx = 1 / n_grid
inv_dx = 1 / dx
dt = 7 * 1e-5
N = 7 # 线的条数
typeIII = 800 # 每条线的typeIII点数
typeII = typeIII + 1
typeI = 1000 # 每条线的typeI点数
n_particle_1 = typeI * N #总typeI点数
n_particle_2 = typeII * N
n_particle_3 = typeIII * N
n_particle_12 = n_particle_1 + n_particle_2
total_particle = n_particle_1 + n_particle_2 + n_particle_3
iterator_1 = ti.var(dt = ti.f32,shape=n_particle_1)
iterator_2 = ti.var(dt = ti.f32,shape=n_particle_2)
iterator_3 = ti.var(dt = ti.f32,shape=n_particle_3)
iterator_12 = ti.var(dt = ti.f32,shape=n_particle_12)
rho = 1#密度
#x,v,volume中数据的储存
# 0,...,n_particle_1-1是所有纤维的typeI粒子
# n_particle_1, ..., n_particle_12 -1 是所有的 typeII粒子
# n_particle_12, ..., total_particle -1 是所有的 typeIII粒子
# 详情于reset()实现
x = ti.Vector(dim, dt = ti.f32, shape=total_particle)
v = ti.Vector(dim, dt = ti.f32, shape=total_particle)
volume = ti.var(dt = ti.f32, shape=total_particle)
D_inv = ti.Matrix(dim, dim,dt = ti.f32,shape = n_particle_3)
d = ti.Matrix(dim, dim,dt = ti.f32,shape = n_particle_3)
C = ti.Matrix(dim, dim, dt=ti.f32, shape=total_particle)
FE = ti.Matrix(dim, dim, dt = ti.f32, shape = (n_particle_1 + n_particle_3))
grid_v = ti.Vector(dim, dt=ti.f32, shape=(n_grid, n_grid))
grid_m = ti.var(dt=ti.f32, shape=(n_grid, n_grid))
grid_v_star = ti.Vector(dim,dt = ti.f32, shape = (n_grid, n_grid))
f = ti.Vector(dim,dt = ti.f32, shape = (n_grid, n_grid))
ROTATE = ti.Matrix([[0,-1.0],[1.0,0]])
@ti.func
def QR2(F):
f1 = ti.Vector([F[0,0],F[1,0]])
f2 = ti.Vector([F[0,1],F[1,1]])
r11 = f1.norm(1e-9)
q1 = f1/r11
r12 = f2.dot(q1)
q2 = f2 - r12 * q1
r22 = q2.norm(1e-9)
q2/=r22
Q = ti.Matrix.cols([q1,q2])
R = ti.Matrix([[r11,r12],[0,r22]])
return Q,R
cf = 0.00
@ti.func
def RETURN_MAPPING(FEp):
Q,R = QR2(FEp)
r12 = R[0,1]
r22 = R[1,1]
#A = ti.Matrix([[E*r11*(r11-1.0)+gamma*r12**2, gamma * r12 * r22],[gamma * r12 * r22, k * ti.log(r22) * float(r22 <1)]])
a = gamma * ti.abs(r22)
b = cf * k * (1 - r22)**2 * r22
c = ti.abs(r12)
if a * c - b * float(r22 < 1) > 0:
if r22 > 1:
r12 = 0.0
r22 = 1.0
elif r22 < 0:
print("alert!!!!!!!!!!!!")
r12 = 0.0
else:
r12 = (r12 * b)/(c * a)
R[0,1] = r12
R[1,1] = r22
return Q@R
else:
return FEp
@ti.func
def damping_affine(C):
Ck = 0.5 * (C.transpose() + C)
Cs = 0.5 * (C - C.transpose())
return Ck + (1-damping_C) * Cs
@ti.func
def mesh_x_ind(mid,l):
return n_particle_1 + mid + mid//typeIII + l
@ti.kernel
def FORCE_INCREMENT():
#print("---------FORCE_INCREMENT-------")
for p in iterator_1:#type 1 粒子贡献的力
base = (x[p] * inv_dx - 0.5).cast(int)
fx = x[p] * inv_dx - base.cast(float)
FEp = FE[p]
Q,R = QR2(FEp)
r11 = R[0,0]
r12 = R[0,1]
r22 = R[1,1]
#A = ti.Matrix([[E*r11*(r11-1)+gamma*r12**2,gamma * r12 * r22],[gamma * r12 * r22, k * ti.log(r22) * float(r22 < 1)]])
A = ti.Matrix([[E*r11*(r11-1)+gamma*r12**2,gamma * r12 * r22],[gamma * r12 * r22, -k * (1 - r22)**2 * r22 * float(r22 < 1)]])
dphi_dF = Q@A@(R.inverse().transpose())
w = [
0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1.0) ** 2, 0.5 * (fx - 0.5) ** 2
]
dwdx = [
fx-1.5, 2.0*(1.0-fx), fx-0.5
]
for i in ti.static(range(3)):
for j in ti.static(range(3)):
offset = ti.Vector([i,j])
dweight = ti.Vector([ dwdx[i][0] * w[j][1], w[i][0] * dwdx[j][1] ]) * inv_dx
f[base + offset] += -volume[p] * dphi_dF@FEp.transpose()@dweight
for q in iterator_3:
p = q + n_particle_12
base = (x[p] * inv_dx - 0.5).cast(int)
fx = x[p] * inv_dx - base.cast(float)
mesh_p_0 = mesh_x_ind(q,0)
mesh_p_1 = mesh_x_ind(q,1)
base_0 = (x[mesh_p_0] * inv_dx - 0.5).cast(int)
fx_0 = x[mesh_p_0]*inv_dx - base_0.cast(float)
base_1 = (x[mesh_p_1] * inv_dx - 0.5).cast(int)
fx_1 = x[mesh_p_1]* inv_dx - base_1.cast(float)
w = [
0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1.0) ** 2, 0.5 * (fx - 0.5) ** 2
]
dwdx = [
fx-1.5, 2*(1.0-fx), fx-0.5
]#这只是B样条导数,不是基函数的导数
w_0 = [
0.5 * (1.5 - fx_0) ** 2, 0.75 - (fx_0 - 1.0) ** 2, 0.5 * (fx_0 - 0.5) ** 2
]
w_1 = [
0.5 * (1.5 - fx_1) ** 2, 0.75 - (fx_1 - 1.0) ** 2, 0.5 * (fx_1 - 0.5) ** 2
]
FEp = FE[q+n_particle_1]
Q,R = QR2(FEp)
r11 = R[0,0]
r12 = R[0,1]
r22 = R[1,1]
A = ti.Matrix([[E*r11*(r11-1)+gamma*r12**2,gamma * r12 * r22],[gamma * r12 * r22, -k * (1 - r22)**2 * r22 * float(r22 < 1)]])
dphi_dF = Q@A@(R.inverse().transpose())
dp2 = ti.Vector([d[q][0,1],d[q][1,1]])
dphi_dF2 = ti.Vector([dphi_dF[0,1],dphi_dF[1,1]])
Dp_inv1 = ti.Vector([D_inv[q][0,0],D_inv[q][0,1]])
for i in ti.static(range(3)):
for j in ti.static(range(3)):
offset = ti.Vector([i,j])
dweight = ti.Vector([ dwdx[i][0] * w[j][1], w[i][0] * dwdx[j][1] ]) * inv_dx
weight_1 = w_1[i][0] * w_1[j][1]
weight_0 = w_0[i][0] * w_0[j][1]
f[base + offset] += -volume[p] * dphi_dF2 * dweight.dot(dp2)
f_vert = dphi_dF@Dp_inv1
f[base_1 + offset] += -volume[p] * weight_1 * f_vert
f[base_0 + offset] += volume[p] * weight_0 * f_vert
return
bound = 3
@ti.kernel
def GRID_COLLISION():
#print("---------GRID_COLLISION-------")
for i, j in grid_m:
if grid_m[i, j] > 0:
grid_v_star[i,j] = grid_v[i,j] + f[i,j] * dt
inv_m = 1 / grid_m[i, j]
grid_v_star[i, j] = inv_m * grid_v_star[i, j]
grid_v_star[i, j].y -= dt * 9.80 * 30
# center collision circle
sc = ti.Vector([2.0,25.0])
dist = ti.Vector([i * dx - 0.40, j * dx - 0.5])
if sc.x * dist.x**2 + sc.y * dist.y**2 < 0.04 :
dist = (dist*sc).normalized()
grid_v_star[i, j] -= dist * min(0, grid_v_star[i, j].dot(dist))
grid_v_star[i,j] = 0.1 * grid_v_star[i, j] #降低最下层的速度
# box
if i < bound and grid_v_star[i, j].x < 0:
grid_v_star[i, j].x = 0
if i > n_grid - bound and grid_v_star[i, j].x > 0:
grid_v_star[i, j].x = 0
if j < bound and grid_v_star[i, j].y < 0:
grid_v_star[i, j].y = 0
if j > n_grid - bound and grid_v_star[i, j].y > 0:
grid_v_star[i, j].y = 0
return
#还没做和边界的摩擦
@ti.kernel
def FRICTION():
#这里grid_v变成速度
for i,j in grid_v:
if grid_m[i, j] > 0:
grid_v[i,j] = grid_v_star[i,j]
return
@ti.kernel
def TRANSFER_TO_GRID():
#print("-----------------------p2g------------------------------")
for p in x:
base = (x[p] * inv_dx - 0.5).cast(int)
fx = x[p] * inv_dx - base.cast(float)
w = [0.5 * (1.5 - fx)**2, 0.75 - (fx - 1)**2, 0.5 * (fx - 0.5) ** 2]
affine = C[p]
mass = volume[p] * rho
for i in ti.static(range(3)):
for j in ti.static(range(3)):
offset = ti.Vector([i,j])
weight = w[i][0]*w[j][1]
grid_m[base + offset] += (weight * mass + 1e-7)
dpos = (offset.cast(float) - fx) * dx
grid_v[base + offset] += weight * mass * (v[p] + affine@dpos)
def GRID_STEP():
#print("---------------------------grid dynamic--------------------")
FORCE_INCREMENT()
GRID_COLLISION()
FRICTION()
@ti.kernel
def TRANSFER_TO_PARTICLE():
#print("---------------------g2p----------------------")
for p in iterator_12:
base = (x[p] * inv_dx - 0.5).cast(int)
fx = x[p] * inv_dx - base.cast(float)
# Quadratic B-spline
w = [
0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1.0) ** 2, 0.5 * (fx - 0.5) ** 2
]
new_v = ti.Vector.zero(ti.f32, 2)
new_C = ti.Matrix.zero(ti.f32, 2, 2)
#收集grid上的速度
for i in ti.static(range(3)):
for j in ti.static(range(3)):
offset = ti.Vector([i,j])
weight = w[i][0] * w[j][1]
dpos_pre = offset.cast(float) - fx
ind = base + offset
g_v = grid_v[ind]
new_C += 4 * weight * g_v.outer_product(dpos_pre) * inv_dx
new_v += weight * g_v
v[p] = new_v
C[p] = damping_affine(new_C)
for q in iterator_3:
p = q + n_particle_12
mesh_p_0 = mesh_x_ind(q,0)
mesh_p_1 = mesh_x_ind(q,1)
v[p] = 0.5 * (v[mesh_p_0] + v[mesh_p_1])
base = (x[p] * inv_dx - 0.5).cast(int)
fx = x[p] * inv_dx - base.cast(float)
# Quadratic B-spline
w = [
0.5 * (1.5 - fx) ** 2, 0.75 - (fx - 1.0) ** 2, 0.5 * (fx - 0.5) ** 2
]
new_C = ti.Matrix.zero(ti.f32, 2, 2)
for i in ti.static(range(3)):
for j in ti.static(range(3)):
offset = ti.Vector([i,j])
weight = w[i][0] * w[j][1]
dpos_pre = offset.cast(float) - fx
ind = base + ti.Vector([i, j])
g_v = grid_v[ind]
new_C += 4 * weight * g_v.outer_product(dpos_pre) * inv_dx
C[p] = damping_affine(new_C)
return
@ti.kernel
def UPDATE_PARTICLE_STATE():#使用APIC
#print("---------------------update----------------------")
for p in iterator_1:#粒子1 更新
x[p]+=dt * v[p]
FE[p]+=dt * C[p]@FE[p]
# if( ti.abs(FE[p].determinant()-1) > 0.01 ):
# print("type1 deformation warning: ",FE[p])
for q in iterator_2:#粒子2 更新
p = q + n_particle_1
x[p]+=dt * v[p]
for q in iterator_3:#粒子3更新
mesh_p_0 = mesh_x_ind(q,0)
mesh_p_1 = mesh_x_ind(q,1)
p = q + n_particle_12
nabla_v = C[p]
dp1 = x[mesh_p_1] - x[mesh_p_0]
dp2 = ti.Vector([d[q][0,1],d[q][1,1]])
dp2+=dt * nabla_v@dp2
d[q] = ti.Matrix.cols([dp1,dp2])
FE[q + n_particle_1] = d[q]@(D_inv[q])
x[p] = 0.5 * (x[mesh_p_0] + x[mesh_p_1])
@ti.kernel
def PLASTICITY():
for p in FE:
FE[p] = RETURN_MAPPING(FE[p])
length = 0.75
width = 0.001
unitL = length/typeIII
v1 = length/typeI
v2 = unitL/3
gap = 0.01 #纤维之间的空隙
@ti.kernel
def reset():#初始化位置,体积,形变梯度,D
for q in range(n_particle_2):
p = q + n_particle_1
line = q//typeII # 所在第line根纤维
vert = q%typeII #所在纤维的第vert个顶点
x[p] = ti.Vector([0.2+ vert * unitL,0.7 + line * gap]) #每根纤维起始位置为 (0.2,0.7 +line * gap)
if vert==0 :volume[p] = v2
elif vert+1 == typeII:volume[p] = v2
else: volume[p] = 2 * v2
C[p] = ti.Matrix([[0,0],[0,0]])
for q in range(n_particle_3):
mid = q + n_particle_12
p0 = mesh_x_ind(q,0)
p1 = mesh_x_ind(q,1)
x[mid] = 0.5 * (x[p0] + x[p1])
Dmid1 = x[p1] - x[p0]
Dmid2 = (ROTATE@Dmid1)
Dmid2/=Dmid2.norm(1e-8)
d[q] = ti.Matrix.cols([Dmid1,Dmid2])
D_inv[q] = d[q].inverse()
FE[q + n_particle_1] = ti.Matrix([[1.0,0],[0.0,1.0]])
volume[mid] = v2
C[mid] = ti.Matrix([[0,0],[0,0]])
for p in range(n_particle_1):
#随机在每根纤维上撒typeI点
line = p//typeI
x[p] = [ti.random() * (length + 0.004) + 0.198, (ti.random()-0.5) * width + 0.70 + line * gap]
FE[p] = ti.Matrix([[1.0,0],[0.0,1.0]])
volume[p] = v1
C[p] = ti.Matrix([[0,0],[0,0]])
return
gui = ti.GUI("Curve", (res, res))
def main():
#result_dir = "./results"
#video_manager = ti.VideoManager(output_dir=result_dir, framerate=32, automatic_build=False)
reset()
for i in range(280):
gui.clear(0xFFFAFA)
for _ in range(10):
grid_v.fill([0.0, 0.0])
grid_m.fill(0.0)
f.fill([0.0,0.0])
grid_v_star.fill([0.0,0.0])
TRANSFER_TO_GRID()
GRID_STEP()
TRANSFER_TO_PARTICLE()
UPDATE_PARTICLE_STATE()
PLASTICITY()
# print("----------------end ",i," ---------------")
a = x.to_numpy()
gui.circles(a[n_particle_1:n_particle_12], radius=2, color = 0x1E90FF)
gui.circles(a[n_particle_12:total_particle], radius=2, color=0x1E90FF)
gui.circles(a[0:n_particle_1],radius=1.0,color=0xFF1493)
#gui.circle((0.35, 0.43), radius=102, color=0x068587)
#video_manager.write_frame(gui.get_image())
gui.show()
#video_manager.make_video(gif = True, mp4 = False)
#print(f'GIF video is saved to {video_manager.get_output_filename(".gif")}')
if __name__ == '__main__': main()